RELab tenoexo: a Robotic Hand Orthosis for Therapy and Assistance in Activities of Daily Living
The RELab tenoexo is a lightweight, fully wearable robotic hand orthosis for grasping assistance in people with sensorimotor hand impairment. Several grasp types embedded in a user-friendly design enable to support a large range of daily hand activities and/or therapy tasks. It can be tailored to the needs of individual users in terms of intention detection strategy, physical attachment system, and size. The pediatric version PEXO further allows for its application in therapy with children.

Stroke, spinal cord injury, and cerebral palsy are just a few examples of diseases leading to persistent hand impairment. No matter the cause, the inability to use the affected hand in activities of daily living will affect independence and quality of life. Wearable robotic devices can support the use of the impaired limb in activities of daily living and provide at-home rehabilitation training.
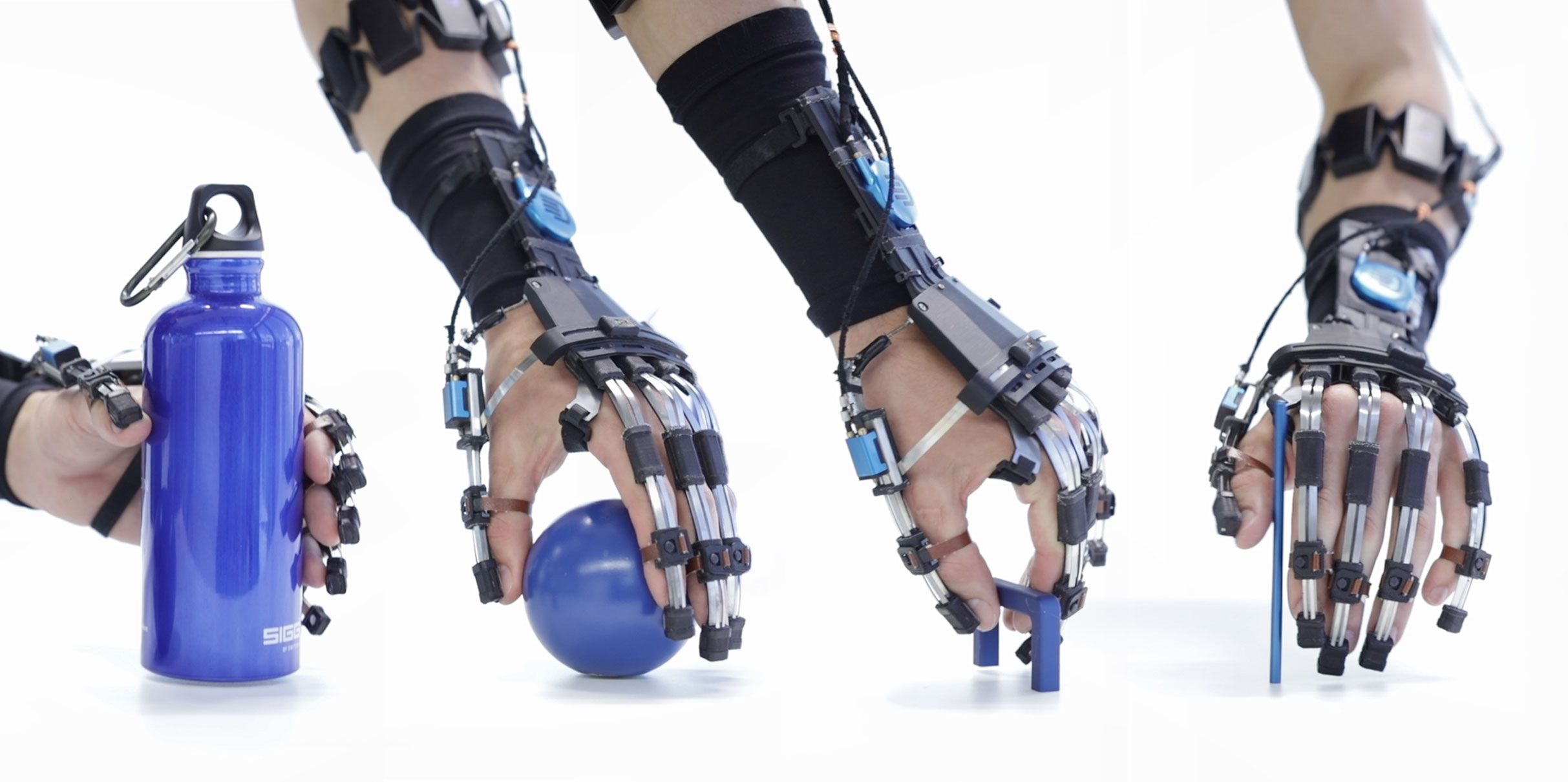
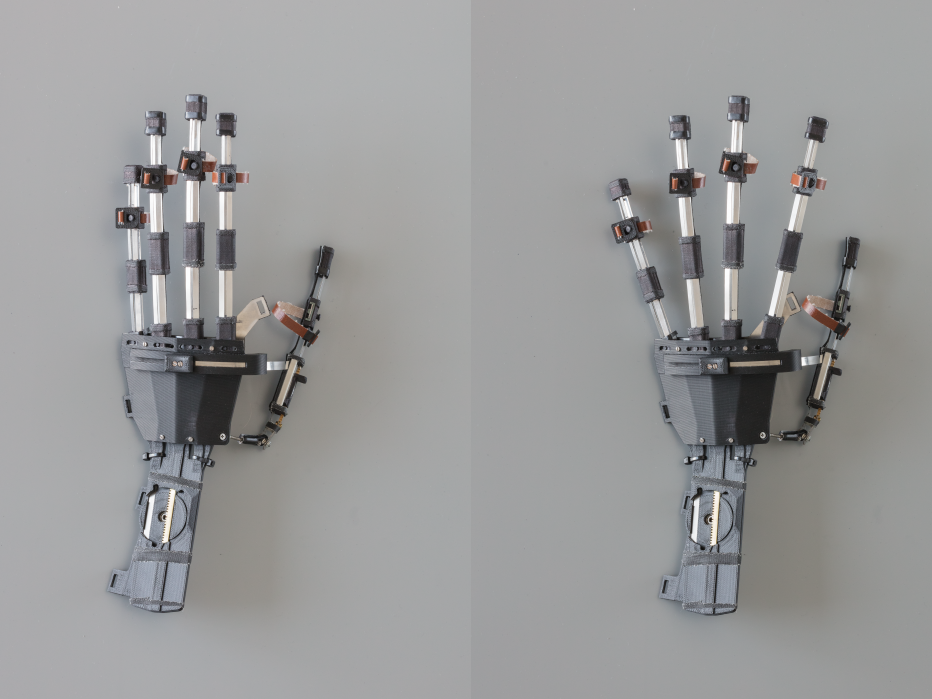
Our robotic hand orthosis, the RELab tenoexo, aims to assist people in grasping tasks during task-oriented therapy and in activities of daily living, such as eating or grooming, by supporting various grasp types. The device underwent various iterative design and evaluation cycles to improve its functionality and usability. The current prototypes, the RELab tenoexo (Bützer et al. 2020) and PEXO (Bützer et al., 2019), are fully wearable and consist of a lightweight hand module (<150 g) as well as a back module including motors, power source, and controllers (720 g), which can be worn as a backpack or mounted on the backrest of a wheelchair. The RELab tenoexo's remote actuation system (Dittli et al., 2020; Hofmann et al., 2018) and its compliant 3-layered sliding spring mechanism (Arata et al., 2013) ensure safe operation and inherent adaptation to the shape of the grasped objects. The actuated thumb module allows for both opposition and lateral grasps. The hand module is fabricated to a large extent by 3D-printing technology and laser cutting. With an underlying automatic tailoring algorithm, a range of possible intention detection strategies and a selection of physical attachment systems, it can be adapted to the individual user’s needs and preferences. The maximal fingertip force of 5 N per finger allows for grasping and lifting of most everyday objects, up to 0.5-liter water bottles.
The RELab tenoexo and PEXO have proved to generate an immediate functional benefit in adults after a spinal cord injury (Dittli et al., 2023) and children with severe hand impairment (Lieber et al., 2022). In collaboration with our clinical partners from the Balgrist University Hospital, the Swiss Children’s Rehab of University Hospital Zurich, and the EOC Neurocentro in Lugano, our current focus is on further evaluating tenoexo and PEXO with several individuals and exploring its potential as an assistive and therapeutic device. Specifically, we want to investigate how tailoring the device to the individual users affects its functionality and usability and whether the robotic hand orthoses can be used in different settings in the home environment.
Specific Research Lines
Unsupervised Usage of the RELab tenoexo
High dose technology-assisted task-oriented therapy has the potential to promote recovery after stroke. Unfortunately, therapy dose is still low after discharge and the transition from technology-assisted therapy exercises to daily life activities is often challenging. To allow high-dose functional training for users with different motor impairments (e.g., from reduced to increased muscle tone), we are redesigning the RELab tenoexo and developing a mobile phone application to allow unsupervised therapy with physical objects in the home environment.
At the Future Health Technologies (FHT) lab at the Singapore-ETH Centre (SEC), the RELab tenoexo is being applied as an assistive device to support individuals after stroke with their activities of daily living. We work to evaluate the immediate functional benefits of using the RELab tenoexo with this population and further assess the feasibility transitioning the device from in clinic usage to home.
Intention Detection Strategies for Assistive Technologies
The intention detection strategy, i.e., the way a user can trigger the desired function of an assistive technology such as the RELab tenoexo, plays a crucial role in the overall usability of such a device. Previous research has presented a wide range of such strategies, yet their usability is not well investigated. We are developing various strategies to be used for the RELab tenoexo and evaluate their usability in order to enable an informed selection of such technologies for a dedicated context of use.
Pediatric Hand Exoskeleton PEXO

PEXO is the first full-hand exoskeleton optimized explicitly for children with neurological hand impairment in size, weight, design, and functionality. In close collaboration with the Swiss Children’s Rehab of University Hospital Zurich, we work on the evaluation of PEXO in clinical and at-home applications and continuous improvement of the device.
tenoexo








Videos
Funding
- NCCR Robotics, a National Centre of Competence in Research, funded by the Swiss National Science Foundation
- ETH Foundation
- Gemeinnützige Stiftung Accentus
- Bank Vontobel
- National Research Foundation Singapore (NRF) under its Campus for Research Excellence and Technological Enterprise (CREATE) programme, Singapore-ETH Centre, Future-Health Technologies