Dynamic Estimation of Human Knee Joint Impedance during Gait
We are investigating how healthy humans control the mechanical impedance of the knee joint during gait. We developed a powered exoskeleton to apply brief position perturbations at specific points in the gait cycle, while measuring the interaction torque. The gained knowledge can be used for the design and control of robotic prostheses and orthoses.
To effectively and safely interface with the human body, powered prosthetic and orthotic devices require compact and efficient actuators which are capable of imposing a wide range of human-scale output forces. Many groups have proposed that variable impedance actuation is of critical importance to the design and control of lower-limb prostheses and orthoses, citing reasons like improved comfort, increased safety, energetic efficiency, and expanded locomotive performance (Tucker et al., 2015).
We are investigating variable impedance actuation and its application to lower-limb assistive devices. This impedance variation can be achieved through a combination of mechanical design and control (Tucker et al., 2015). Toward mechanical design, we have demonstrated the Hybrid Ultrasonic motor-Clutch Actuator (HUCA) as a means to achieve impedance modulation through mechanically decoupling a non-backdrivable actuator from the output across a differential gear (Tucker and Gassert, 2012). This “differential-damper” topology is potentially scalable to an appropriate package for use in, e.g., a transfemoral prosthesis. Toward control, we are investigating ways in which we can exploit the actuator’s inherent passive dynamics to implement efficient and stable impedance variation.
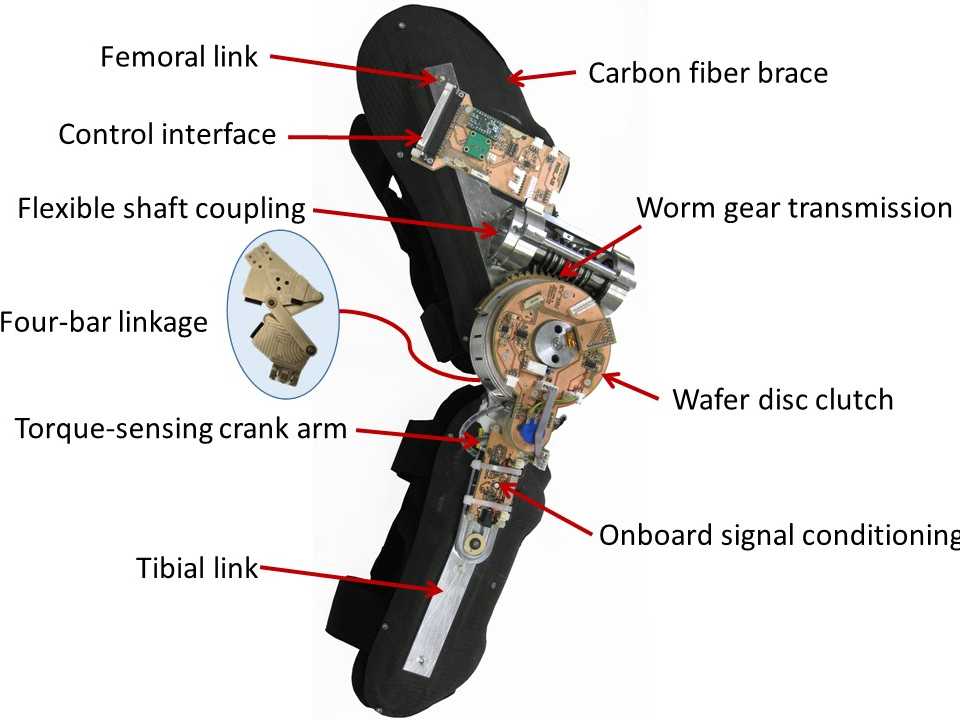
Open questions remain, however, regarding the exact magnitude and rate-of-change of dynamic knee joint impedance of able-bodied humans. To address these questions, we have developed a robotic tool for experimentally estimating the instantaneous impedance during gait through the application of single-joint position or velocity perturbations (Tucker et al., 2013). The tool, called the “Knee Perturbator”, is a remotely actuated knee exoskeleton for the study of physiological impedance modulation in healthy subjects during various modes of gait.
The knee perturbation study on healthy human subjects is currently underway. We believe that the Knee Perturbator will provide an increased understanding of how physiological knee joint impedance is modulated, which is expected to have a direct influence on how we can improve the design and control of the next-generation powered lower-limb assistive devices.
Collaborators
external page Prof. James S. Sulzer




Funding
- Swiss National Science Foundation through the National Center of Competence in Robotics (NCCR Robotics)
- ETH Zurich Foundation