VariLeg - A Lower Limb Exoskeleton with Variable Impedance Actuation for Paraplegics
We are investigating how variable impedance actuation can improve gait velocity and stability in lower-limb exoskeletons. To evaluate the usefulness of soft actuators, we work with a powered exoskeleton that has been developed in collaboration with other labs of ETH Zurich in the scope of a focus project over 2 years. The VariLeg successfully took part in the CYBATHLON 2016.
With the new VariLeg enhanced, in collaboration with the product development group at ETH Zurich and the Institute for Lab Automation and Mechatronics at the University of Applied Sciences in Rapperswil (HSR), we are preparing for participation in the CYBATHLON 2020.
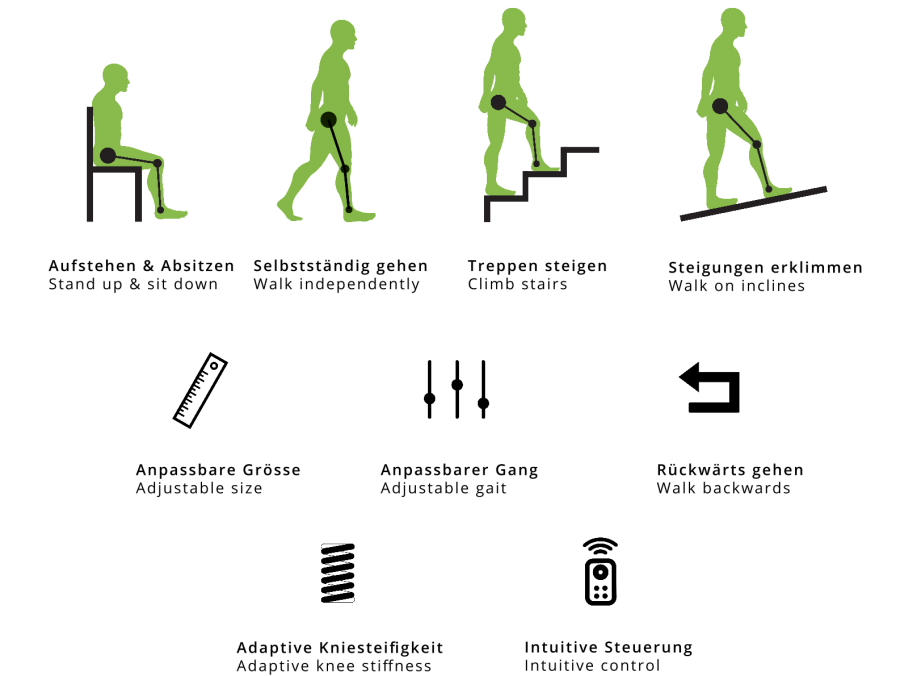
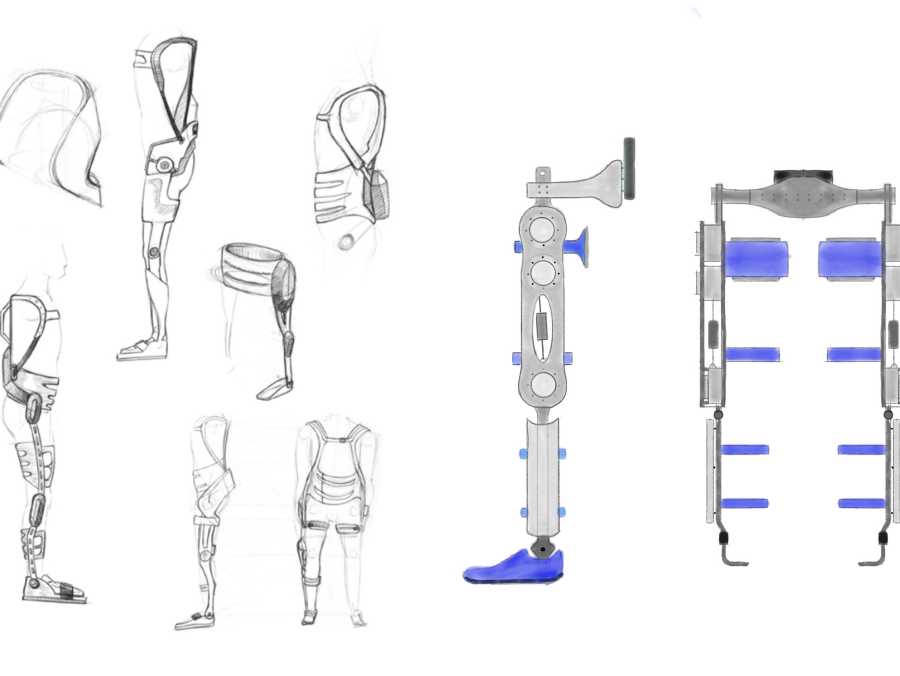
We believe that ideal assistive devices for lower limbs, like exoskeletons, should be capable of varying their impedance to achieve performance comparable to human legs. The VariLeg exoskeleton was designed to restore natural gait for paraplegic users with complete loss of motor functions in their legs. The novelty of this device is that the knee joint is driven by a external page variable stiffness actuator (VSA). The VSA will be used in an impedance controller modulating stiffness according to data found in human gait, which is thought to improve stability and efficiency of ambulation.

Before using the full capabilities of the VSA, it was important to develop a device that allowed pilots to walk safely. Therefore, two users with paraplegia were first trained in the VariLeg using the VSA like a classical series elastic actuator at a chosen static stiffness. After one year of training and the successful participation in the Cybathlon 2016, the acquired feedback from the test users was integrated in the design iterations.
Especially, the user attachment system was improved to allow better adaptations to each pilot. This is an important step, as every actuation and control approach cannot optimally be leveraged if the pilot is not properly connected to the device. Now that both pilots are familiar with walking in the VariLeg, we strive to explore the capabilities of the VSA and compare it to a VariLeg with stiff joints as well as a VariLeg with series elastic actuation.


The VariLeg Project
-
-

-

Photo: Patrick Pfreundschuh, ETH Zürich -

-