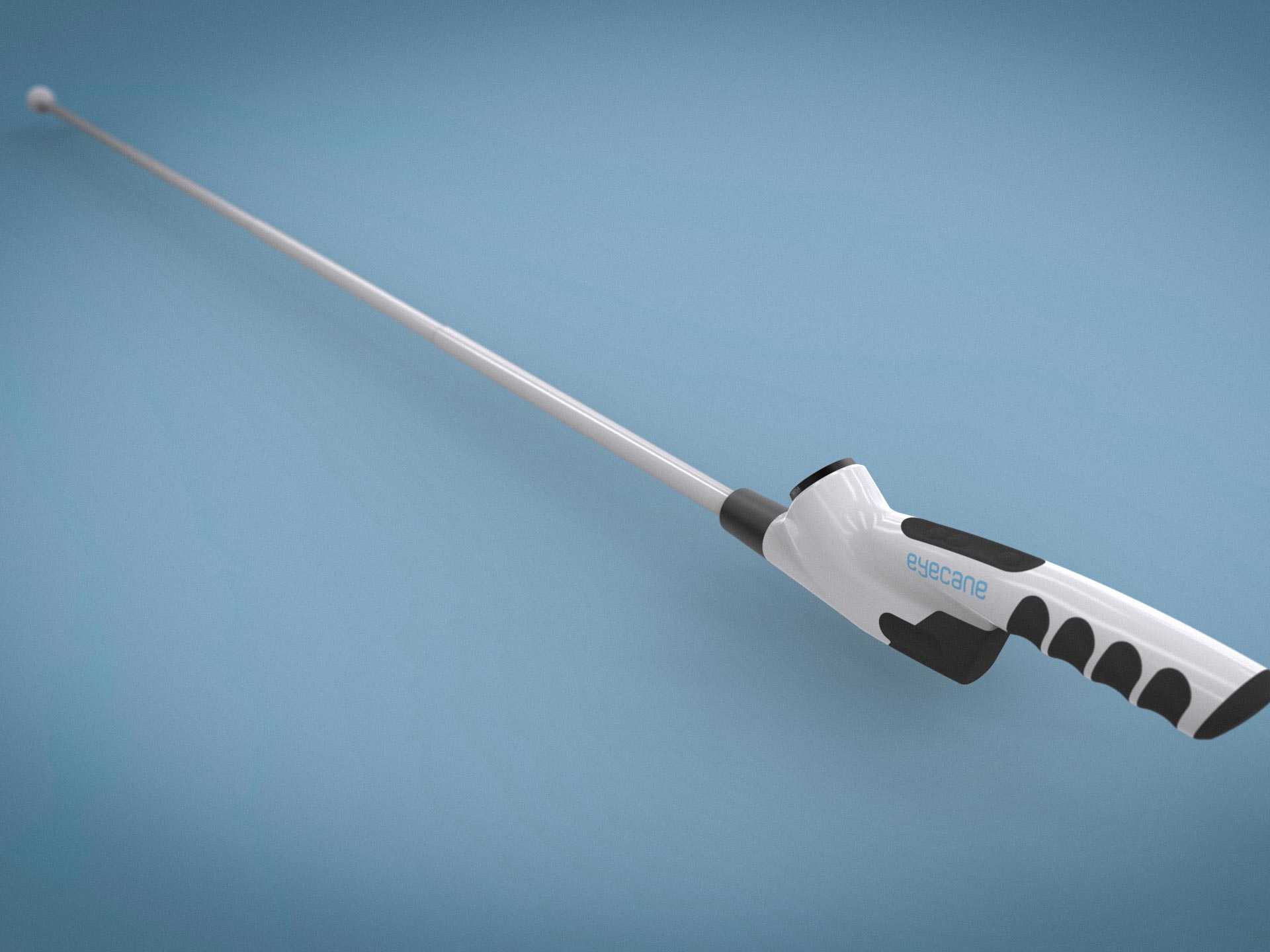
Seeing White Cane
Although many electronic mobility aids for the blind and visually impaired have been developed in recent years, they are hardly used in everyday life. Those affected continue to rely on the traditional cane. This is due to two shortcomings: The developments were oriented more to other technological possibilities than to the actual needs of the users. And the sense of touch (haptic perception), which is important for the blind and visually impaired, is neglected.

The white cane is a widely used mobility aid that helps visually impaired people navigate the surroundings. While it reliably and intuitively extends the detection range of ground-level obstacles and drop-offs to about 1.2 m, it lacks the ability to detect trunk and head-level obstacles. Electronic Travel Aids (ETAs) have been proposed to overcome these limitations, but have found minimal adoption due to limitations such as low information content and low reliability thereof. Although existing ETAs extend the sensing range beyond that of the conventional white cane, most of them do not detect head-level obstacles and drop-offs, nor can they identify the vertical extent of obstacles. Furthermore, some ETAs work independent of the white cane, and thus reliable detection of surface textures and drop-offs is not provided.
This paper introduces a novel ETA, the Advanced Augmented White Cane, which detects obstacles at four vertical levels and provides multi-sensory feedback. We evaluated the device in five blindfolded subjects through reaction time measurements following the detection of an obstacle, as well as through the reliability of dropoff detection. The results showed that our aid could help the user successfully detect an obstacle and identify its height, with an average reaction time of 410 msec. Drop-offs were reliably detected with an intraclass correlation > 0.95. This work is a first step towards a low-cost ETA to complement the functionality of the conventional white cane.

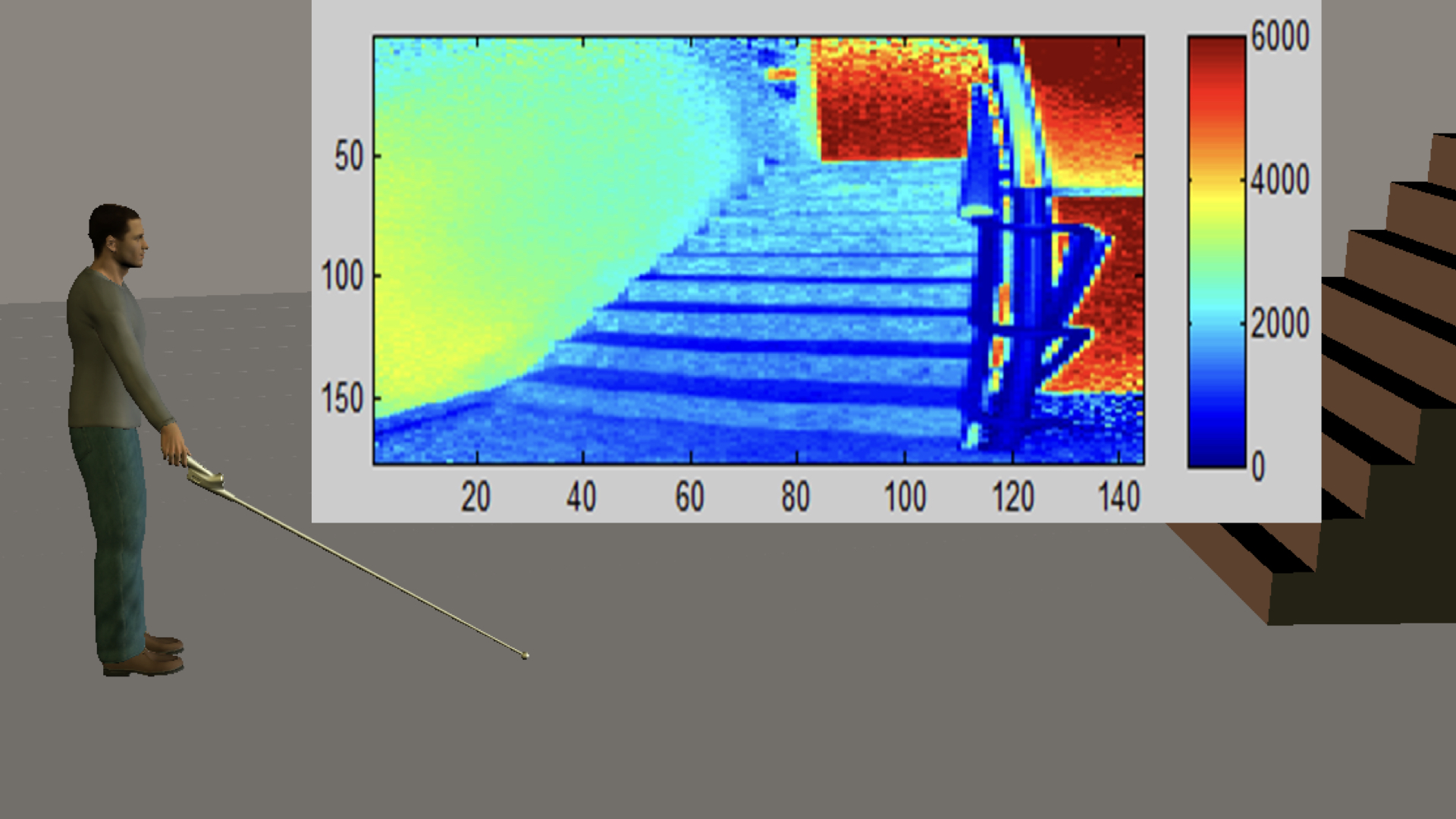

In a joint project, the "external page Zugang für alle" foundation, the external page Zurich University of the Arts, MESA Imaging AG and the Rehabilitation Engineering Lab have developed an electronic mobility aid for the blind and visually impaired, which now aims to overcome these weaknesses. The "seeing blind cane" uses a 3D camera to capture the surroundings and their obstacles and transmits the information to the affected person's fingers by means of vibration patterns.