Neuroscience Robotics
The fusion of non-invasive neuroimaging and high-performance robotics provides a powerful tool to investigate human sensorimotor control and related dysfunctions under well-controlled and reproducible conditions. The Rehabilitation Engineering Laboratory and its partners have made pioneering contributions to this emerging field of Neuroscience Robotics.
In the following you will find an overview of our developments in terms of fMRI/MRI-compatible actuation, sensing and robotic interfaces as well as the neuroscience studies that have been carried out with these systems.
Neuroscience Robotics Image Gallery
-
Cover page of the IEEE Engineering in Medicine and Biology Special Issue on MRI Robotics. -

fMRI-compatible finger interface with hydrostatic actuation and force-feedback via fiber-optic sensor. -

Cable-driven fMRI-compatible haptic interface to investigate precision grip control [Vigaru et al., IEEE Transactions on Haptics 2016] -
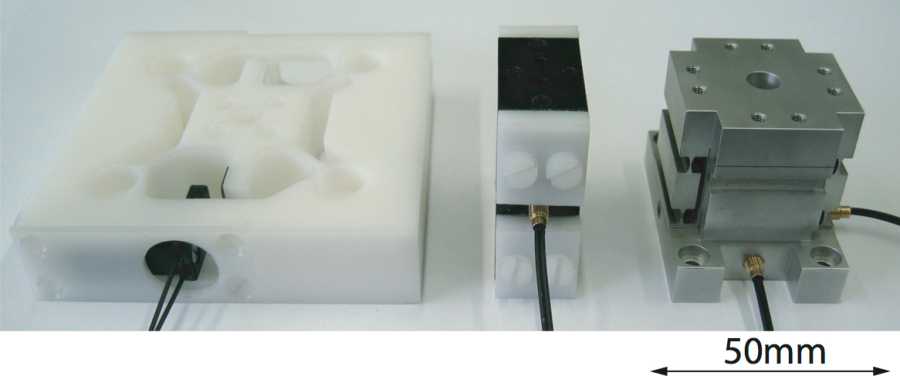
Fiber-optics based force/torque transducers manufactured from polymers (left), through assembly of carbon spring blades and polymer elements, as well as through electroerosion of an aluminium structure. -
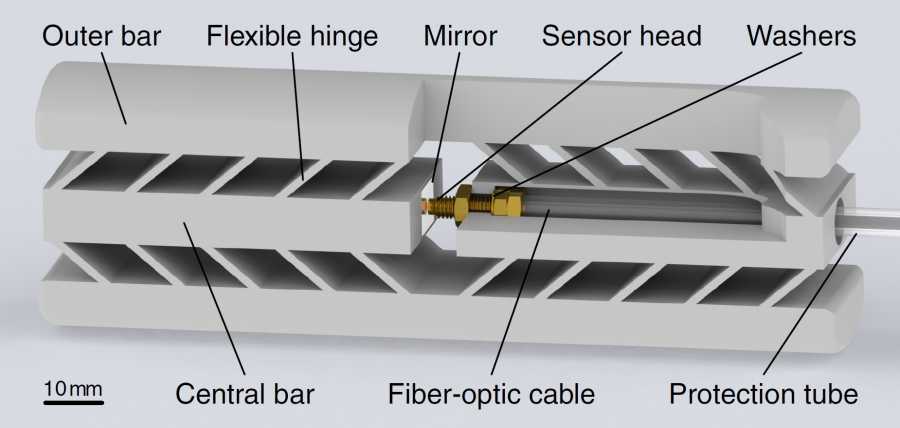
Rendering of grip force sensor with partial cut in the monobloc structure to visualize placement of the fiber-optic sensor and mirror for reflected light intensity measurement [Bützer et al., J Sensors, 2016]