Physical Human Robot Interaction
More information can be found in the course catalog.
Since the fall semester 2011, the Rehabilitation Engineering Lab is offering a course on Physical Human-Robot Interaction. The weekly 2h lecture, covering topics such as human factors, sensing, data acquisition, actuation, modeling control and safety/performance analysis, is complemented by weekly 2h laboratory sessions and a specialization project.
The concept of this course is described in detail in Download Gassert et al., IEEE Trans Educ 56(1), 2013 (PDF, 1.5 MB).
Course Goal
The goal of this course is for students to understand the critical elements in human-robot interactions – both in terms of engineering and human factors – and use these to evaluate and design safe and efficient assistive and rehabilitative robotic systems.
Laboratory Sessions
Laboratory sessions are carried out on the ETHZ Haptic Paddle, a low-cost force-feedback device based on the open hardware haptic paddle successfully used at universities throughout the US.
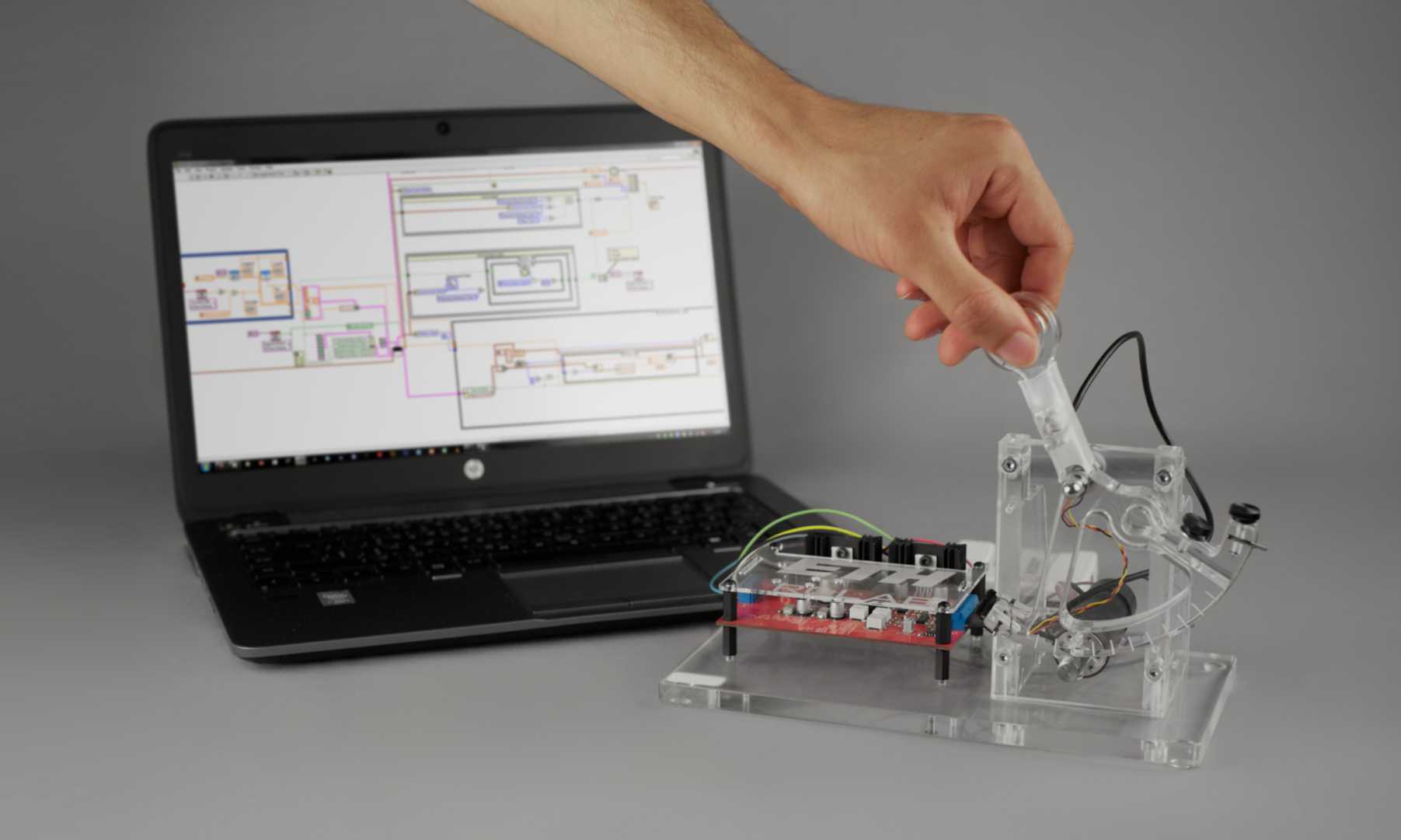
You can obtain a copy of the ETHZ Haptic Paddle hardware documentation by completing the linked request form.
Course Description
This link will take you to the page of the Physical Human-Robot Interaction course in the ETHZ course catalogue.
Overview of the pHRI Course:
Specialization projects offered to students in groups of two:
A description of the specialization projects can be found Download here (PDF, 633 KB)
Course Notes and Material
Lecture slides, related publications and material for the specialization projects can be found on Moodle via MyStudies or by following this link.